|
MICROROBOTICS
| The
design
of the coupling depends on the micromanipulation system. It should be
the more
transparent : should not filter the information for the command and
the sensors. Contact method encounter adhesion phenomena as non-contact
are subject to Brownian motion. |
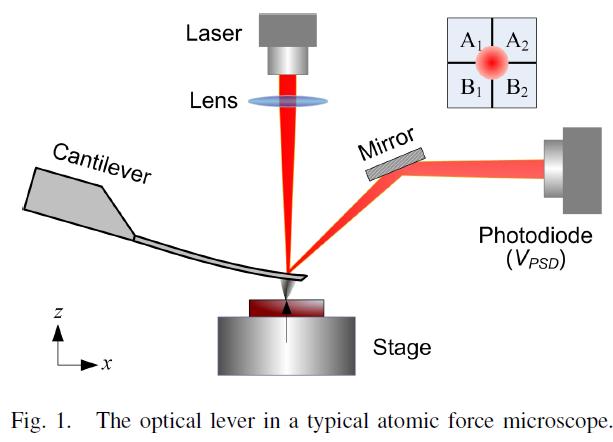
Atomic
Force Microscope
The
micromanipulation team
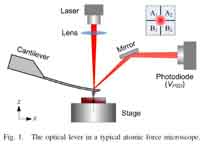
of ISIR has run experiments on AFM setups. The measurement of the force
is performed
by a common captor: a quadrant measuring the displacement of a laser
beam
pointing due to deflection of the cantilever. The model to reconstruct
the
force image is a mechanical beam so that this captor acts like a filter
and
looses information on mechanical interactions. The range of measurement
and the
resolution is very limited for this system. And even if it is possible
to design
a stable coupling for AFM micromanipulation the
workspace is small and the transparency of the system is low. |
 |
Optical
tweezer
The
team
in collaboration with the CEA laboratory has thus decided to
investigate other
micromanipulation techniques. More particularly, non contact
micromanipulation uses
potential models with a large linear domain, they simplify the
problematic of
transparent coupling and will increase the sensations.
The
optical tweezer seems to be a good candidate : it begins to be
widespread in
biology and physics laboratories, it has many applications especially
in
nanoworld, it permits easy force measurements of microworld
interactions, it has
a linear model in most of its 3D workspaces and presents less pull in
and pull off effect.
The
following link shows that some laboratories are already interested in this field. |
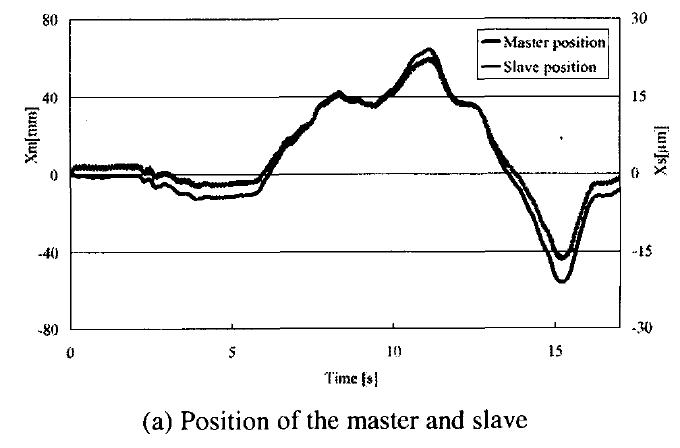
- From
1999,
Fumihito Arai, Tohoku University, Graduate School of
Engineering Dept. Bioengineering and Robotics, Japan
Pioneer
work on force feedback using a quadrant position detection method,
which is precise and quick system. The haptic expertise of this
laboratory permit to those papers to be still the better coupling
methods and interface designed.
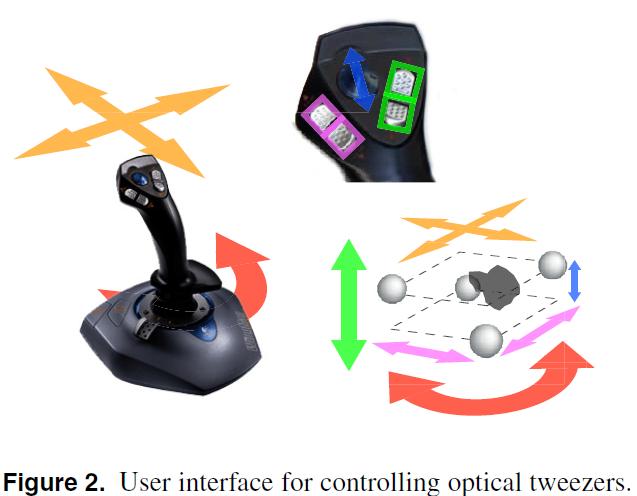
- From
2006,
Miles Padgett, University of Glasgow, Department of Physics and
Astronomy, United Kingdom
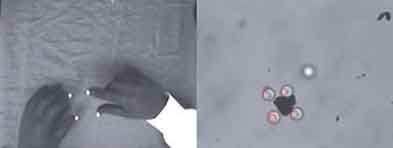
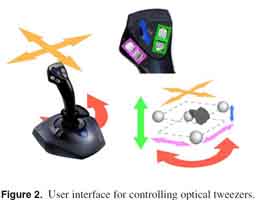
The
Glasgow laboratory is interested in new interface for a better
manipulation. They develop 3D control of bead displacement with a
joystick or a finger tracking. Presently, they do not use force
feedback interface.
 |
|
| G. Whyte, G.
Gibson, J. Leach,
Miles J. Padgett "An optical trapped microhand for manipulating
micron-sized objects" Optics Express, 14, 25, 12497
(2006) |
G. Gibson, L.
Barron, F. Beck, G. Whyte, M. J.Padgett "Optically controlled grippers
for manipulating micron-sized particles" New Journal of Physics 9, 14
(2007) |
- From
2006, Büküsoglu and
Basdogan, Koc University, College of Engineering, Turkey
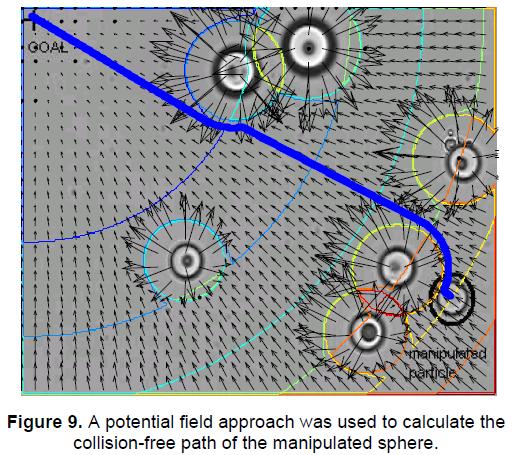
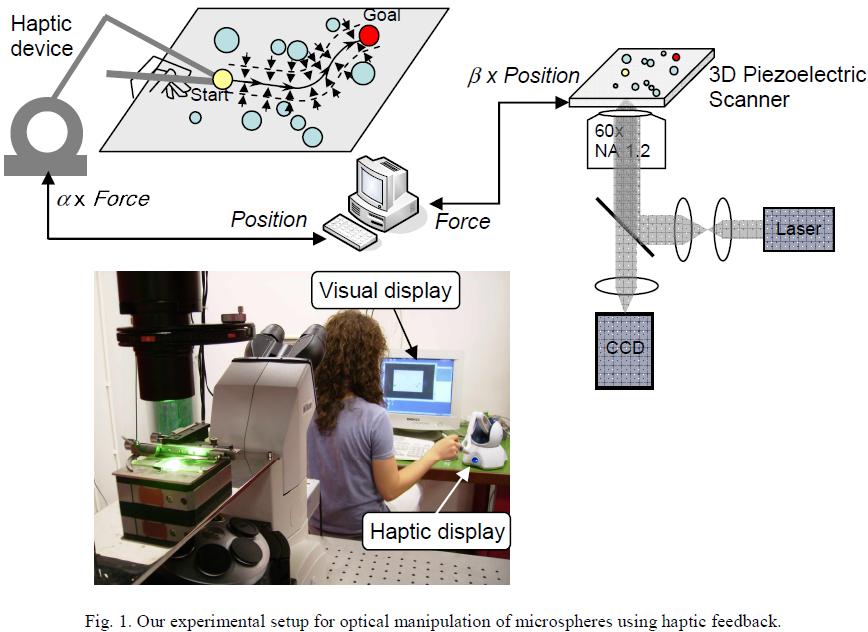
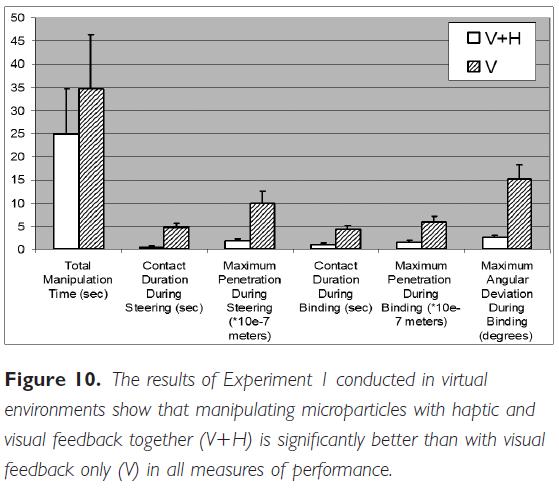
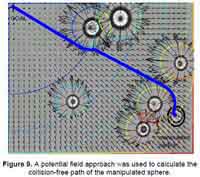
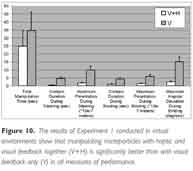
An interesting
guiding approach. Their studies show the dexterity improvement and the
learning
capabilities with a virtual field feedback system.
 |

|
 |
| I.
Büküsoglu, C. Basdogan, A. Kiraz, A. Kurt "Haptic
manipulation of microspheres using optical tweezers" Symposium on Haptic Interfaces
for Virtual Environment and Teleoperator Systems 2006 March 25 - 26,
Alexandria, Virginia, USA |
C.
Basdogan, A. Kiraz, I.
Büküsoglu,
A. Varol, S. Doganay "Haptic guidance for improved task performance in
steering microparticles with optical tweezers" Optics
Express, 15, 18, 11616 (2007) |
I.
Büküsoglu, C. Basdogan, A. Kiraz, A. Kurt "Haptic
Manipulation of Microspheres Using Optical Tweezers Under the Guidance
of Artificial Force Fields" Presence,
Vol. 17, No. 4, August 2008, 344–364 |
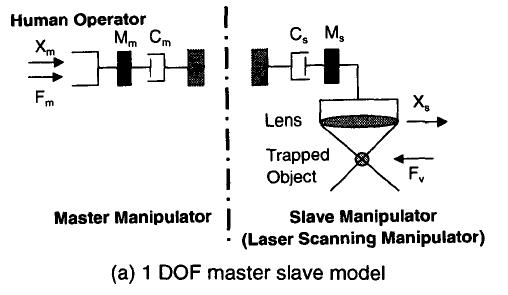
- From
2006, van West, Yamamoto and Higuchi, University of Tokyo, School of
Engineering, Japan
 |
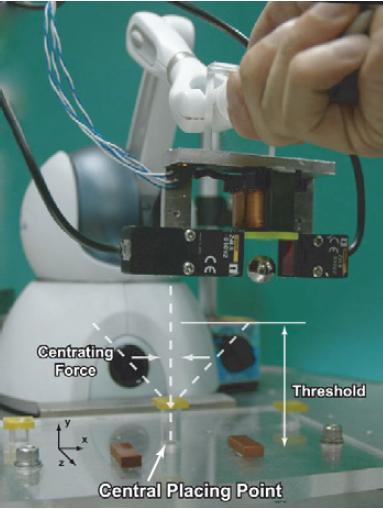
The concept of
haptic for non-contact manipulation is clearly explained. They apply
their theory on magnetic micromanipulator
E. van West, Akio Yamamoto, Toshio Higuchi. "The concept of "Haptic
Tweezer", a non-contact object handling system using levitation
techniques and haptics" Mechatronics
17 (2007) 345–356 |
From
2007,
Sigiura, Nara Institute of Science and Technology, Department of Genomics and Informatics, Japan
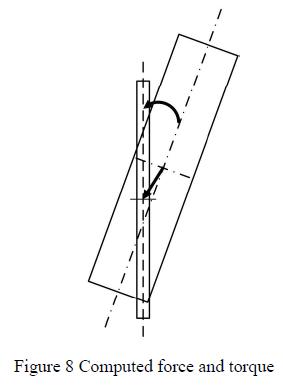
Their researches are oriented to touch cells. | From
2007,
Lee Sigiura, Nanoscale Simulations Laboratory, Gwangju Institute of Science and Technology, Korea
They try to handel nanowires with help of force feed-back from computed forces and torques. | 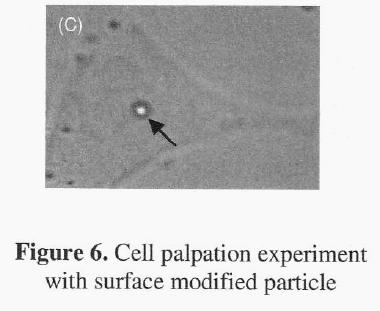 | | T. Sugiura, M. Nakao, T. Sato, K. Minato. "Nanomanipulation and nanotechnology for future diagnostics". Stud Health Technol Inform. 2008;134:135-42. | S.-W. Lee, T. Lee, and Y.-G. Lee. "Stable manipulating of nanowires by line optical tweezers with haptic feedback" Proc. SPIE, Vol. 6644, 66441X (2007) |
|
C
O
U
P
L
I
N
G
|
H
A
P
T
I
C
|
|